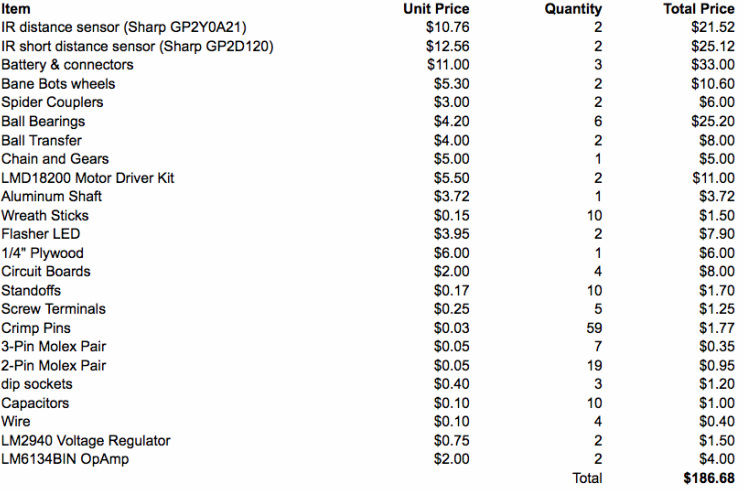
We acknowledge that we went over budget. There are several things that could have made the robot less costly. We are mainly using the long distance IR sensors to wall follow, with the short range sensors as a backup. With more time we could have better tuned the long range IR distance sensors so that the short range distance sensors would not be needed. We could have used more standard small LED's as opposed to the large prepacked flasher LED's which we bought. We probably could have done with bushings versus the ball bearings we selected.